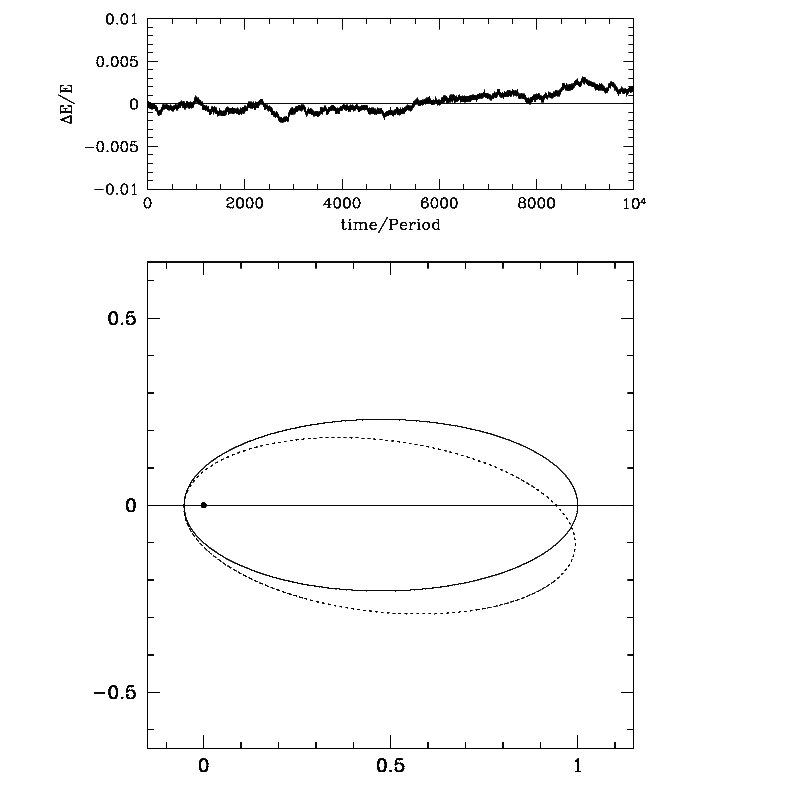
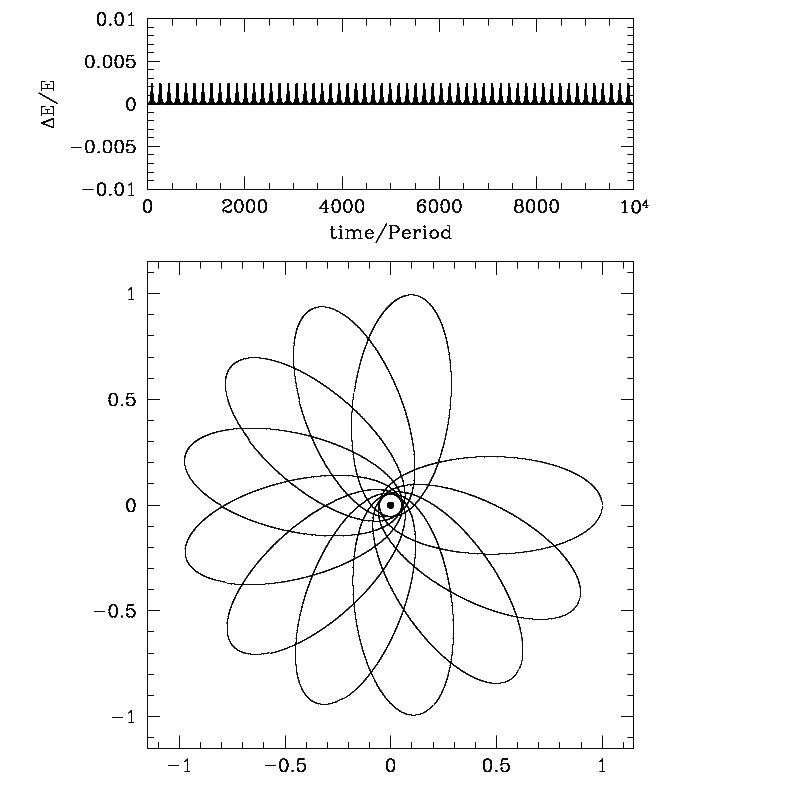
The same as the first plot, but done with constant time-step. Thus, this is pure leapfrog integration with the same force estimates per orbit: 1500. The energy conservation is better for variable time step for the first 5000 orbits. After that it gets to the same level as leapfrog. If the same test runs for 50,000 orbits, than energy gets worse for variable time-step - about dE/E=0.01. Increasing the accuracy by factor two (as in the plot above) gives accurate solution for at least 100,000 orbits.
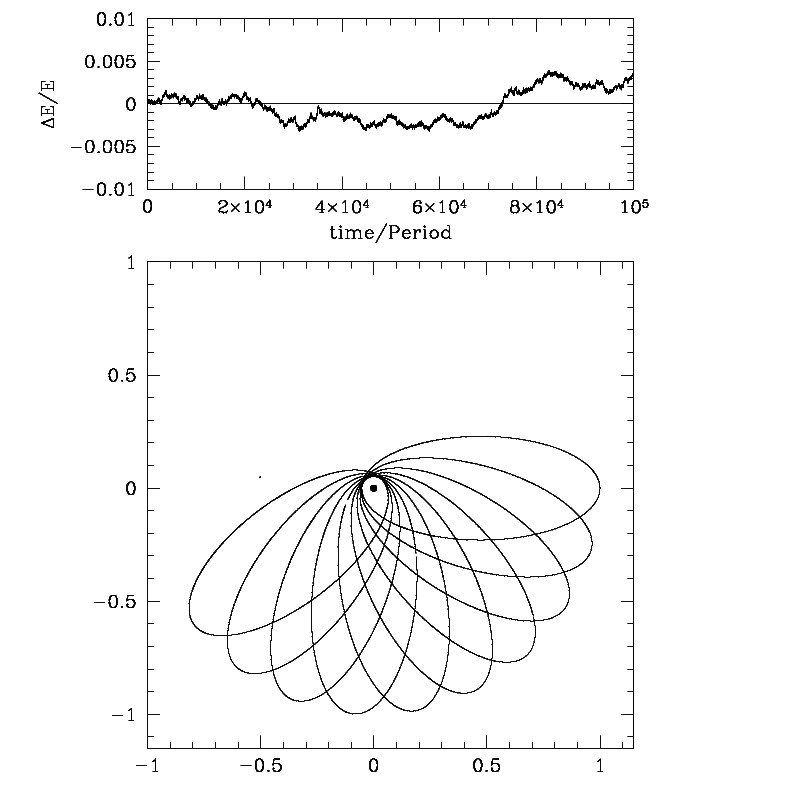
The real advantage of the variable step is in the reduced drift of the direction of the main axis. The bottom panel shows every 100th orbit. The last one is the 1000th orbit. If you compare this with the first plot, where only the 1000th orbit is shown, it is clear that the variable time step improves the accuracy dramatically. |